Aerial-Cars
Object dection and speed estimation.
Training
- As I have a relatively low-end computer, I only used
yolov8n, which means there is wide room for improvement if I use a more powerful one, such asyolov8loryolov8x. - 28 epoch - 1.3 hours
- 367 images - 416x416
-
dataset details can be found here
- What I observed in the last few epochs is that the mAP50 and mAP50-95 barely improve. I ran a few more epoch after with (patience=4) and it stops prematurely, which means the model stops improving. However, at the same time, the
patiencevalue is really low to draw any meaningful conclusion.
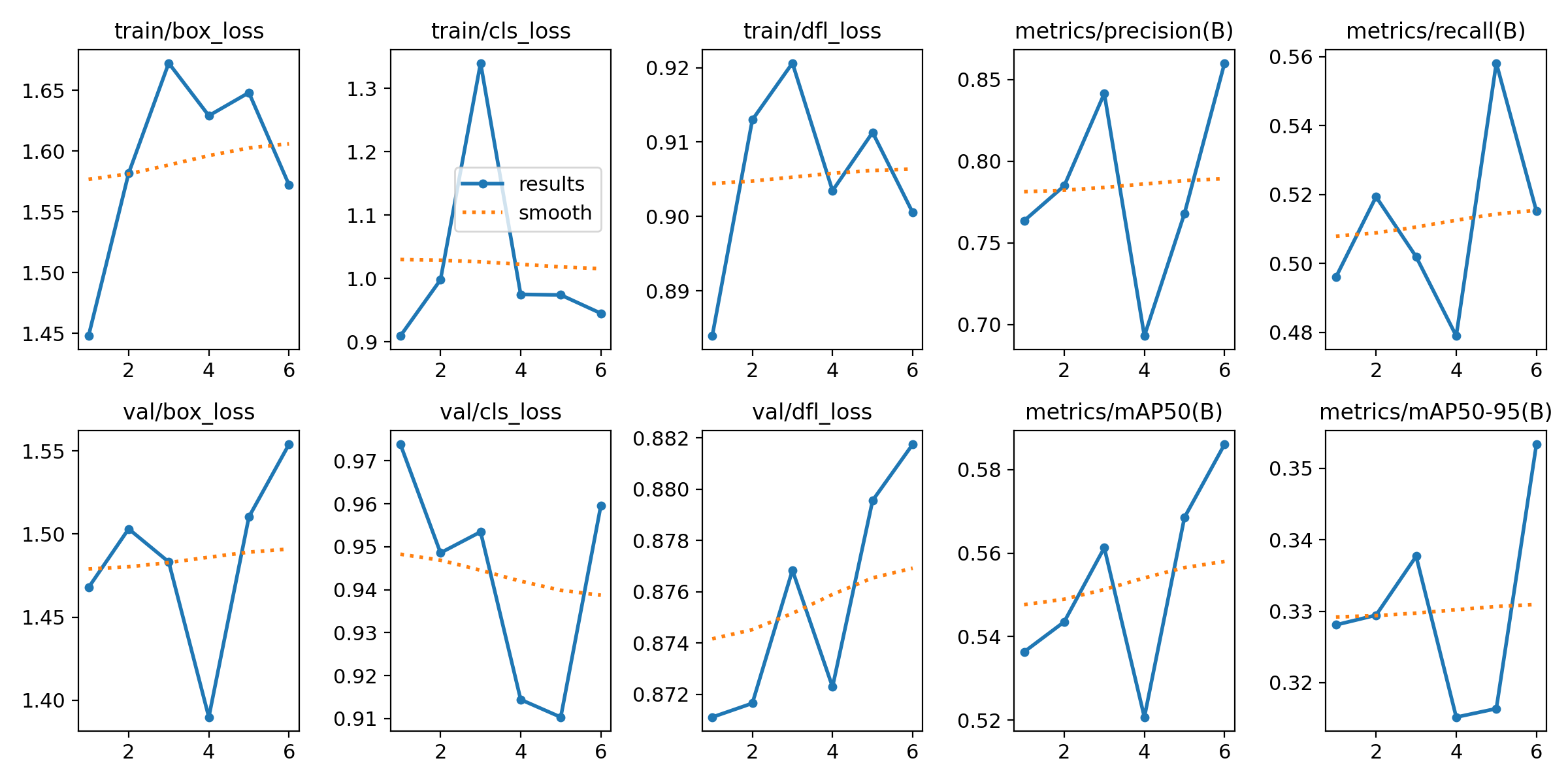 latest training result (yolov8n).
latest training result (yolov8n).
the model trained mostly on “far view” dataset, such that I tried to use it on this video
Calculations
- The idea is fairly simple: since the camera is positioned top-down, if we know the pixel distance a car move in the frame, we can translate it into real-world measurements.
- I use the following source:
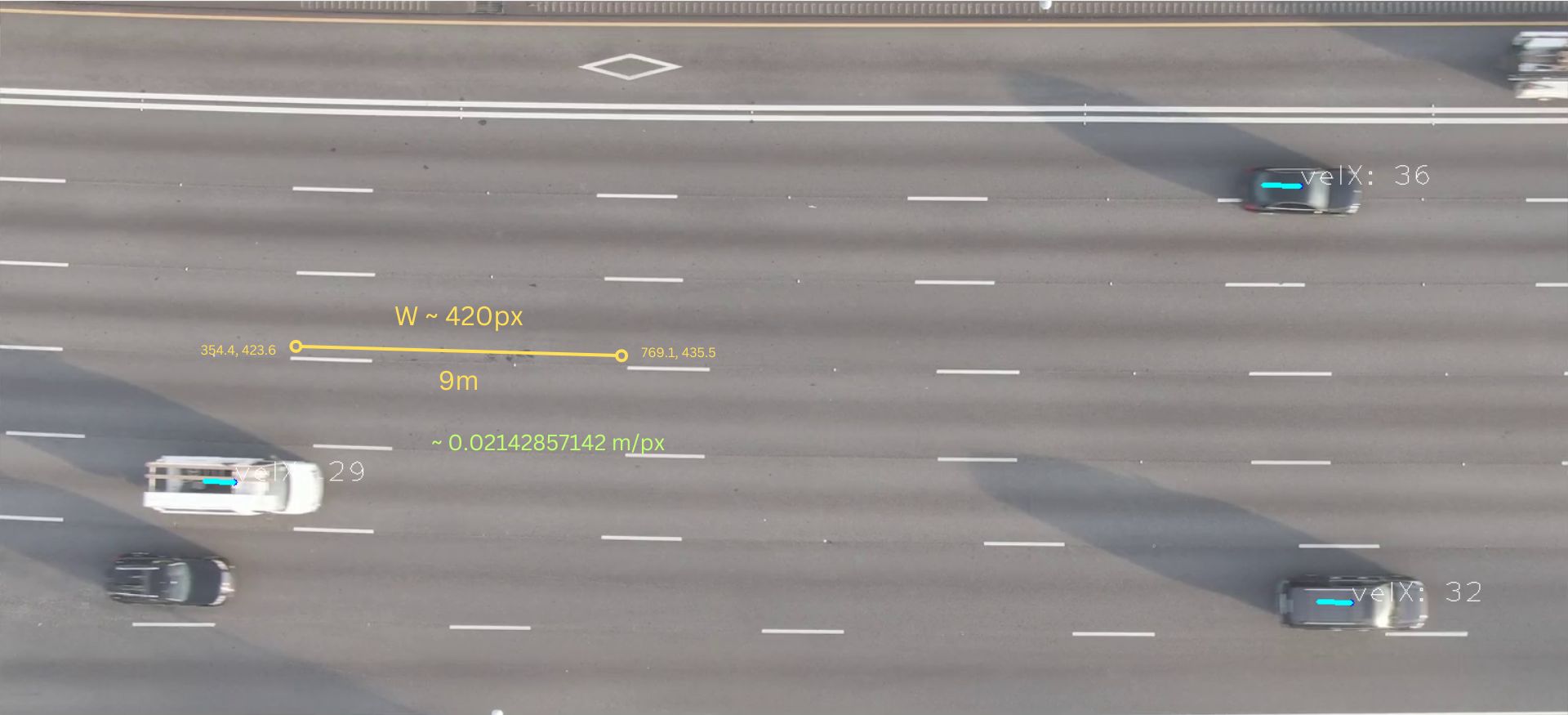
-
Based on these, we can see that:
speedX = distanceX * meter_per_pixel * fps(each frame) -
To get the distance, simply store the
idof each car in a dictionary, then compare and update it every frame (or any duration of time).
Initial approach (motion detection)
My initial approach is to use Motion detection + Custom tracking based on distance, but later I decided to use yolov8 for expansion potential and learning purposes.
![]()
initial idea of tracking + assigning id in ROI (region of interest)

results of the initial ‘motion detection’ approach